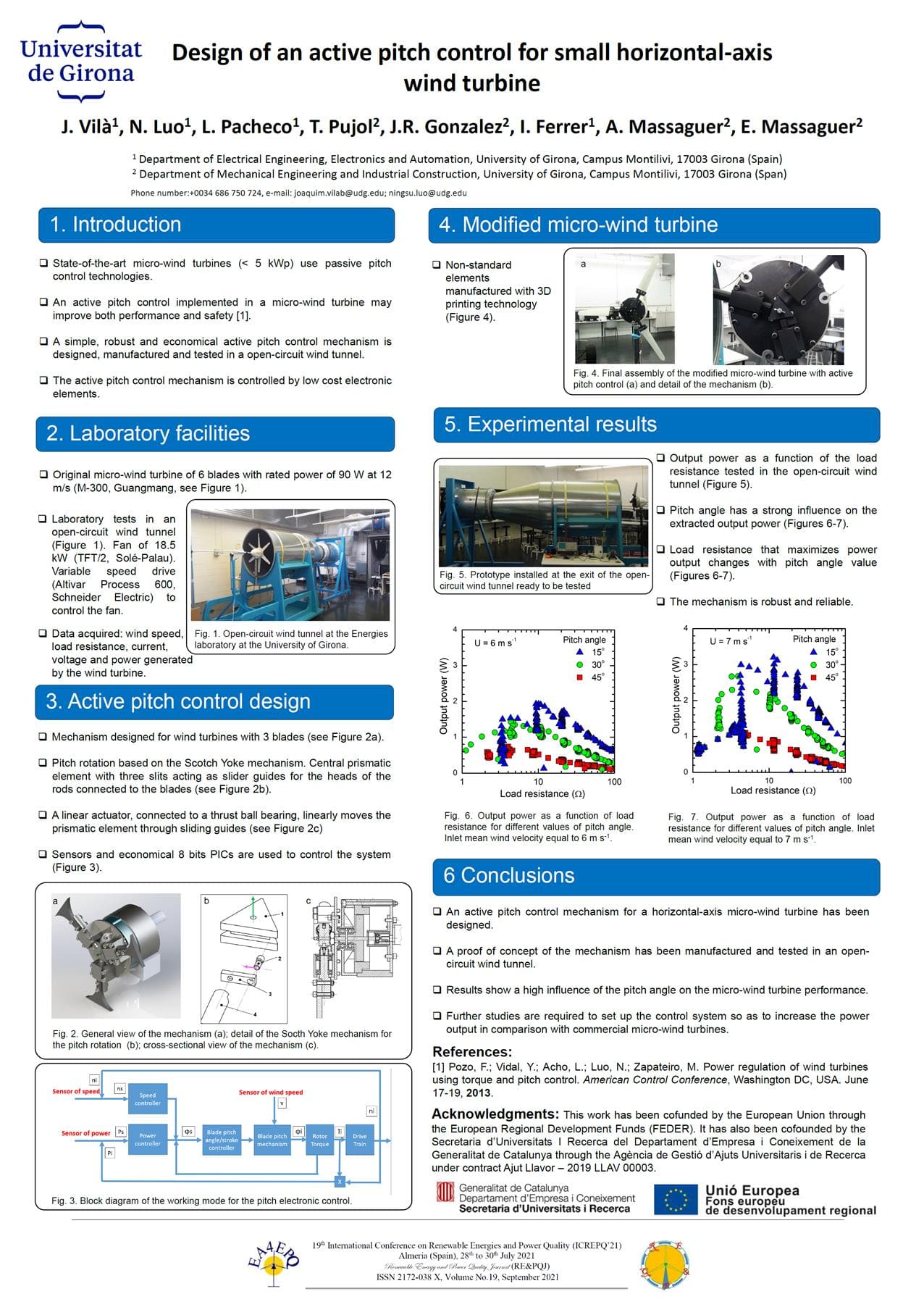
CONTROL ACTIU PITCH D'UN AEROGENERADOR PER MILLORAR EL RENDIMENT
DAVANT VENTS FORTS I RÀFEGUES
(núm. expedient: 2019 LLAV
00003)
|
|
|
|


MEMBRES
DE L’EQUIP
Dr. Ningsu Luo (científic responsable), Dr. Joaquim Vilà
(científic emprenedor), Dr. Lluís Pacheco (mentor), Dr. Antoni Pujol (mentor)
OBJECTIU
DEL PROJECTE
L'objectiu
principal del projecte és demostrar la viabilitat del concepte "proof of
concept" del Control Actiu Pitch (ACP) aplicat a un aerogenerador de baixa
potencia (P<10Kw). Per fer-ho, es disposa d'un aerogenerador de 2.2Kw sense
cap tipus de mecanisme de regulació. Cal remarcar que es troba instal·lat en un
emplaçament ideal, en termes de recurs eòlic, i amb diferents fenomenologies
com són la Tramuntana i la Marinada. L'aerogenerador és promogut per l'empresa
Aula Ecogranja Vilà per il·luminar i bombejar aigua, com també per investigació
amb la col·laboració de la UdG. El disseny del ACP està format per dues parts:
mecanisme d'accionament mecànic i el sistema de regulació electrònic. Ambdues
parts seran dissenyades conjuntament i es fabricarà un prototip que serà
implementat a l'aerogenerador. Finalment el ACP serà testejat en les condicions
de vent de l'emplaçament: Tramuntana i Marinada. Es posarà especial atenció en
l'obtenció d'energia mitjançant les ràfegues de vent provocades per la
Tramuntana.
TASQUES
DEL PROJECTE
Tasca
1. Desmuntatge de l’aerogenerador i mesuraments: Inicialment es desmuntarà
l’aerogenerador proposat per tal de fer el disseny del mecanisme actiu Pitch
adaptat a la mecànica existent. Es mesuraran les geometries de tots els
components per poder redissenyar el nou mecanisme adaptat.
Tasca
2. Dissenyar el mecanisme mecànic d’actuador: Del disseny existent,
s’escolliran quins components són reutilitzats i quins són reemplaçats o
mecanitzats a les noves especificacions. També es compraran els components o
parts estàndards per muntar en el conjunt com per exemple l’actuador
elèctric.
Tasca
3. Dissenyar el sistema de regulació electrònic: Es dissenyarà el sistema
electrònic de regulació conjuntament amb el disseny mecànic per tal
d’incorporar totes les parts de control. Es comprarà tots els components
electrònics, com sensors, controlador (micro-controlador), cablejat, etc.
Tasca
4. Mecanitzar les parts mecàniques: Es mecanitzaran les parts d’acord amb el
disseny escollit. Es controlarà la qualitat del mecanitzat per tal de que les
peces s’ajustin a les especificacions de tolerància dimensional, rugositat,
etc. del disseny.
Tasca
5. Muntatge I testejar el mecanisme mecànic d’actuador: S’instal·larà el mecanisme
mecànic per comprovar que s’adapta sense problemes a l’aerogenerador existent.
A falta del sistema de regulació, es faran comprovacions mecàniques com per
exemple, recorregut d’angle Pitch, calibració del
mecanisme sense vibracions, etc.
Tasca
6. Muntatge de sensors i del sistema electrònic: S’instal·laran els sensors en
el mecanisme dissenyat sensor de revolucions d’eix i desplaçament de l’eix de
l’actuador, també l’electrònica de control I finalment es connectarà tot el
cablejat.
Tasca
7. Testejar el Control Actiu Pitch (ACP): Una vegada tot el prototip estigui
instal·lat en l’aerogenerador, es començarà la bateria de tests. Inicialment es
comprovarà que tot el sistema funciona segons les especificacions de disseny.
Posteriorment es començarà la bateria de tests amb les diferents fenomenologies
de vent de l’emplaçament. Es posarà especial atenció en testejar el ACP per
ràfegues de Tramuntana.
RESULTATS
DEL PROJECTE
La tasca 1 duta a
terme va consistir en desmuntar l’aerogenerador de 2,2 kW (diàmetre de pales
3,5 m) i aplicar un procés exhaustiu d’enginyeria inversa. Es van analitzar en
detall tots els components del sistema i es va estudiar el principi de
funcionament del dispositiu original. Entre d’altres aspectes, es va constatar
el poc espai disponible a l’interior de la gòndola i la poca robustesa general
del mecanisme existent. D’aquí vam concloure que: 1) molts dels elements que
inicialment teníem previst instal·lar a la part superior de l’aerogenerador,
s’haurien d’instal·lar a la base, amb un augment en la complexitat i cost del
disseny elèctric/electrònic; 2) no es podrien reutilitzar gaires elements, fent
que el cost total del disseny mecànic augmentés. L’anterior implicava que
qualsevol error en el disseny del mecanisme de control actiu del pitch que, al
provar-lo, necessités una modificació, comportaria un augment dels costos
difícils d’assumir. Amb l’assessoria dels mentors, es va optar per fer un pas
previ al disseny i construcció del mecanisme a escala completa (aerogenerador
de 2,2 kW i 3,5 m de diàmetre). Aquest pas va consistir en fer una prova de
concepte del disseny aplicat a un micro-aerogenerador (0,4 kW i 0,8 m de
diàmetre) assajat en un túnel de vent en
condicions properes a la realitat. El Dept. d’Enginyeria Mecànica i de la
Construcció Industrial de l’Escola Politècnica Superior de la Universitat de
Girona va cedir l’aerogenerador de petita escala així com el túnel de vent
obert incloent tota la instrumentalització necessària. D’aquesta forma, es va
considerar que el petit cost associat a fer la prova de concepte aplicada al
micro-aerogenerador seria més que raonable per la informació sobre la validesa
tècnica del disseny que n’obtindríem.
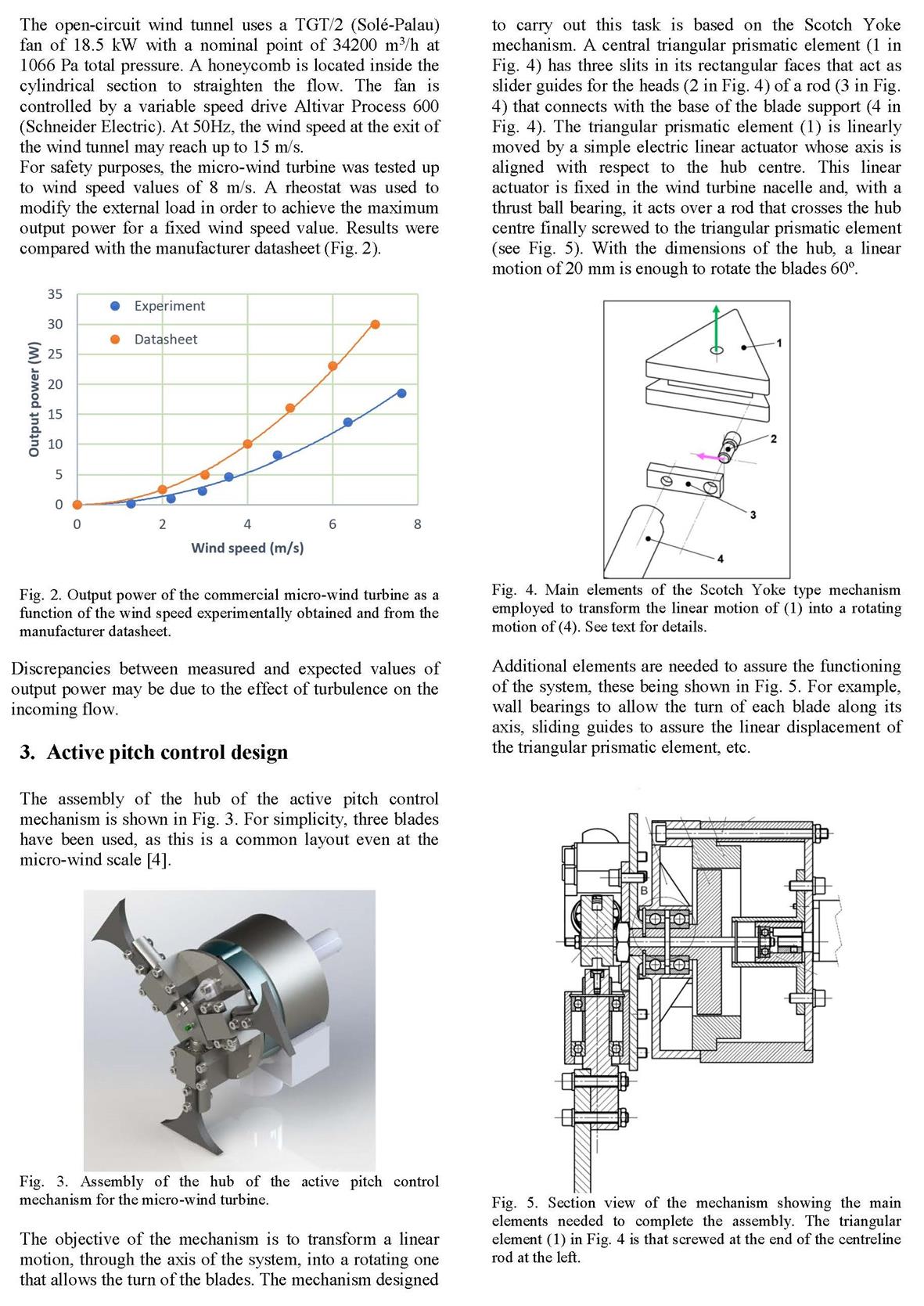
La tasca 2
associada al disseny del mecanisme del moviment del pitch va haver d’incloure
la validació amb un model a escala. Aquesta tasca 2 es va iniciar amb una
proposta de disseny pensada per a l’aerogenerador de 2,2 kW. El disseny
proposat consistia en un mecanisme de biela-manovella accionat linealment per
un dispositiu de tipus jou escocès mogut axialment per una tija central.
L’objectiu consistia en validar aquest disseny en l’aerogenerador de mides més
petites. Es va desmuntar el micro-aerogenerador i es van prendre les mides
adients per escalar el disseny anteriorment proposat. Cal remarcar que,
l’element de referència en tot el procés de disseny va ser l’aerogenerador de
2,2 kW. Per tant, la prova de concepte amb el micro-aerogenerador no va
pretendre millorar-ne el rendiment sinó observar-ne el comportament mecànic.
Per això, es va reduir el nombre de pales del micro-aerogenerador de 6
(micro-aerogenerador e 0,4 kW) a 3 (aerogenerador de 2,2 kW). Per rapidesa i
flexibilitat en futures modificacions, els mentors van aconsellar realitzar les
peces d’aquest disseny mitjançant fabricació per deposició fosa. Els principals
elements del disseny es van fer amb impressió 3D a partir de termoplàstic PETG.
El mecanisme d’accionament del pitch es va muntar en el rotor del micro-aerogenerador
i es va comprovar el seu correcte funcionament en condicions estàtiques.
 ,
, 
Figura 1. Micro-aerogenerador abans
(esquerra) i després (dreta) de la implementació del mecanisme Pitch 3D-printed
amb termoplàstic de color negra.
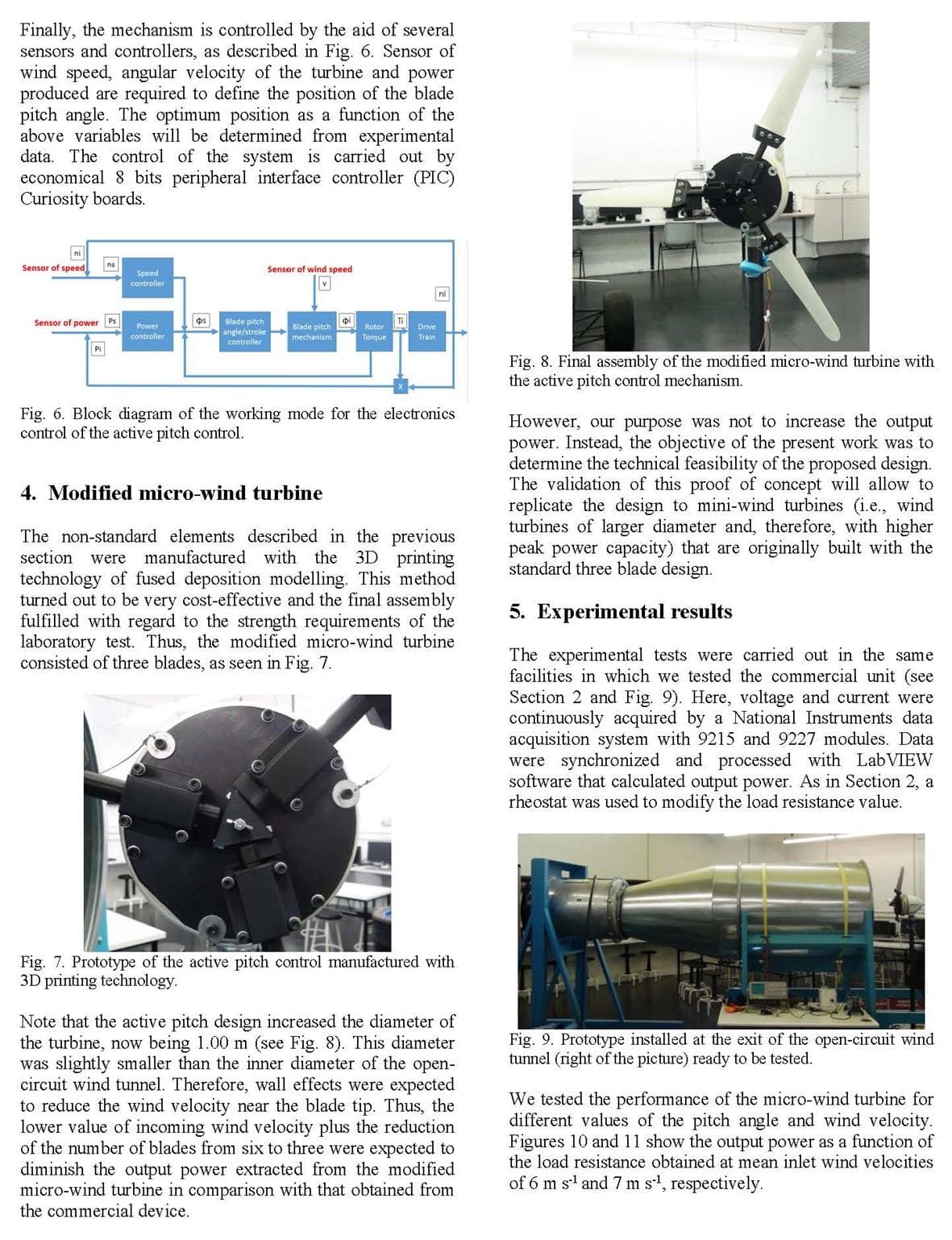
Per conèixer el
funcionament en condicions dinàmiques, el micro-aerogenerador es va assajar en
el túnel de vent obert sotmès a diferents velocitats. Aquests tests es van dur
a terme al llarg de dues setmanes. La velocitat del vent incident es va variar
en cinc valors, partint de 3 m/s fins superar els 8 m/s. En aquests casos, es
va comprovar el funcionament del mecanisme amb angles de pitch variant des de
10º fins a 70º, essent aquest darrer cas clarament irreal però investigat per
comprovar el comportament del mecanisme. Es van dur a terme estudis més
detallats del comportament per a angles de pitch de 15º, 30º i 45º, variant la
resistència de càrrega per tal de trobar la potència màxima assolida.
|
|

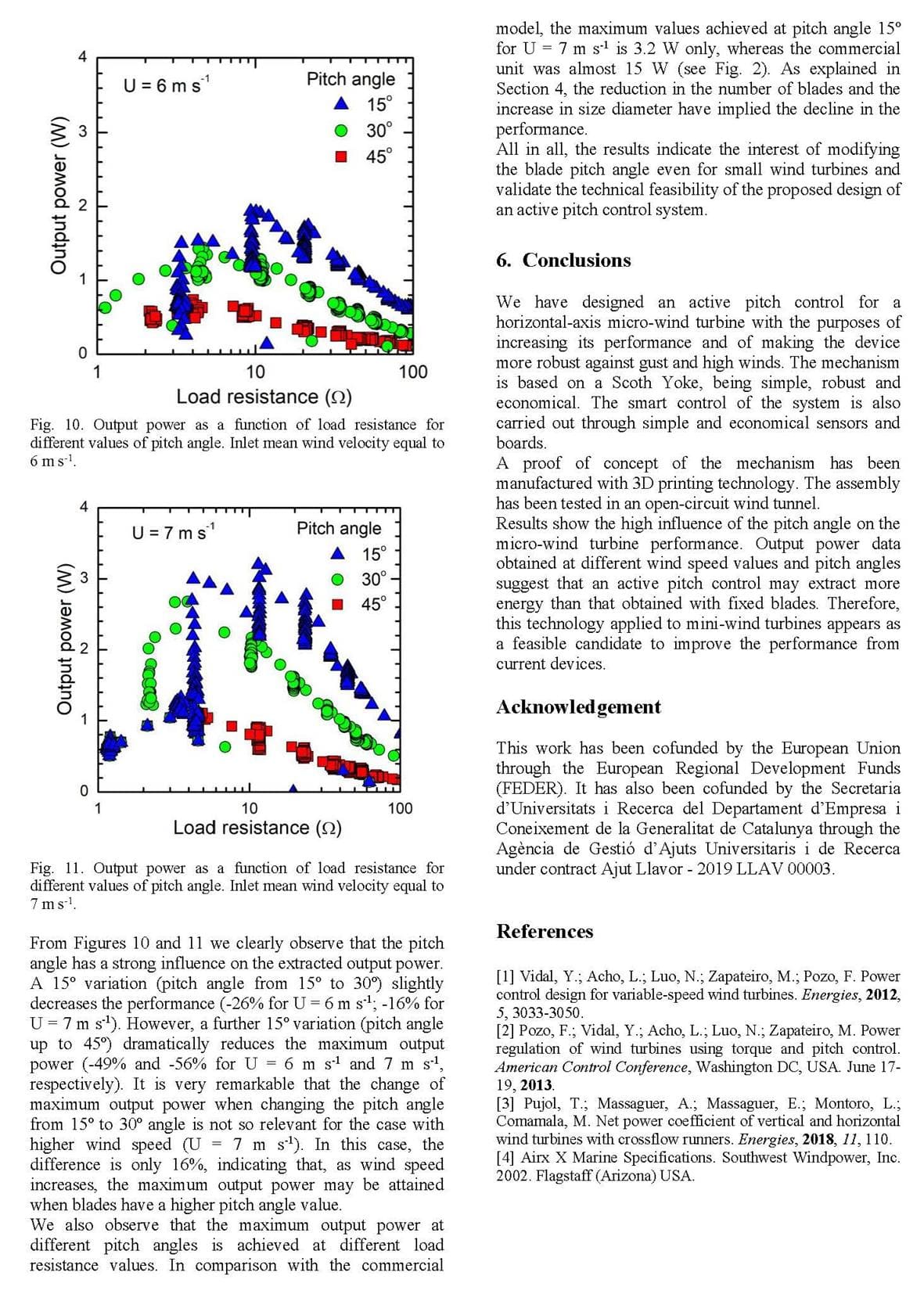
Figura 2. Resultats experimentals
obtinguts amb el micro-aerogenerador de 0.4 kW en el túnel de vent.
L’anàlisi del
comportament dinàmic del mecanisme va revelar un error en el disseny no
detectable en l’estudi estàtic. En aquest cas, es tractava d’un error en el
dimensionament de les guies de desplaçament del dispositiu de jou escocès que
haurien de permetre, en tot moment, un desplaçament paral·lel al pla base del
rotor. La detecció d’aquest problema va permetre refer el disseny amb èxit. En
cas de no haver fet aquesta validació prèvia sota condicions de laboratori amb
el model a escala, aquesta errada s’hagués reproduït en l’aerogenerador de 2,2
kW i hagués comportat una modificació laboriosa i molt més costosa. Amb la
validació del mecanisme proposat, aquesta segona tasca, tal i com estava
exposada a la memòria, també va permetre comprar l’actuador elèctric que
satisfés els requisits de velocitat de desplaçament, cursa de la tija i força
exercida.
En paral·lel al
disseny del mecanisme, també es va dur a terme la tasca 3, que consistia en el
disseny del sistema de regulació electrònic. Al llarg de les reunions setmanals
que s’han dut a terme amb tots els membres del projecte, es va decidir optar
per un sistema de PLC que actués com a màster amb tres esclaus basats en
plaques electròniques amb microcontroladors integrats que treballen de forma
autònoma. Cada esclau té propòsits diferents: l’esclau 1 s’encarrega del
control de pitch, l’esclau 2 de monitoritzar la posició i velocitat de vent
així com les possibles vibracions amb acceleròmetres i galgues extensomètriques i l’esclau 3 del control de càrrega de les
bateries incloent la dissipació de l’energia per excedents en lluminàries i els
senyals per activar llums, bombes hidràuliques i fre del dispositiu per
curtcircuit de fases. Tal i com estava exposat a la memòria del projecte, en
aquesta tasca també s’han adquirit tots els elements necessaris per a la
realització del sistema de regulació electrònic.
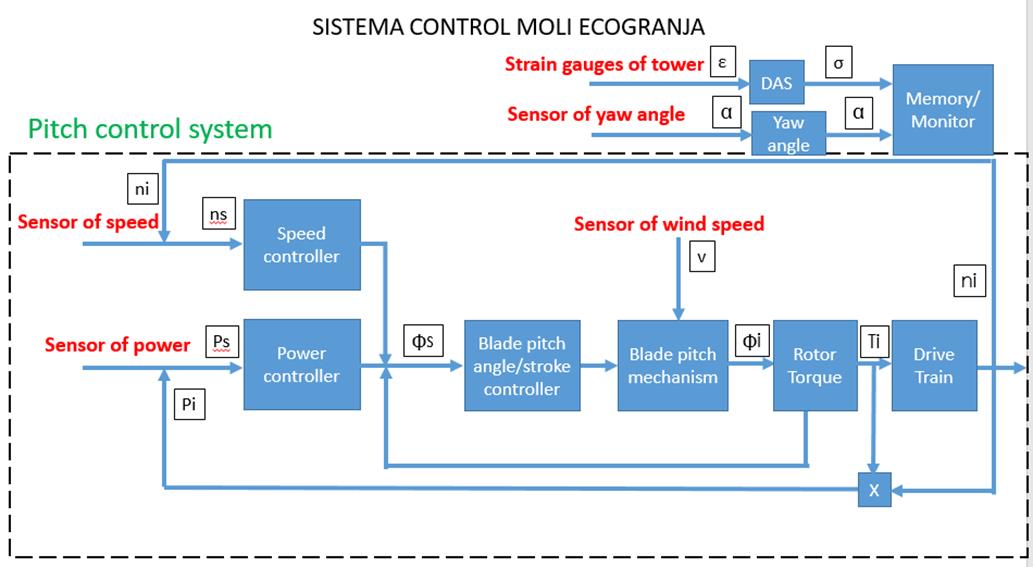
Figura 3. Esquema en blocs del sistema
de control del pitch
En acabar la fase
d’assaig del micro-aerogenerador en el túnel de vent, i un cop detectades i
corregides les errades de la proposta del disseny inicial, es va procedir a
redissenyar per bé el mecanisme que permetés modificar el pitch de les pales.
En aquest redisseny, es va descartar la utilització
de qualsevol element imprès en 3D degut a les elevades sol·licitacions de
l’aerogenerador de 2,2 kW en condicions reals. El disseny va prioritzar la
utilització de components comercials, de robustesa i qualitat conegudes i més
econòmics que en cas de fer-los a mida. Els elements singulars com la subjecció
dels rodaments, la placa de contenció, etc., es van haver de mecanitzar,
d’acord amb la tasca 4 de la memòria del projecte. Es va seguir la recomanació
dels mentors per escollir, a mode de subcontractació, el centre de mecanitzat
que tingués la qualitat suficient per satisfer els nostres requeriments.
|
|
|
|
|




Figura 4. Estructura original de
l’aerogenerador abans d’implementar el Pitch i el disseny 3D en forma piramidal
aplicat sobre l’estructura original.
|
|
|


Figura 5. Detall del mecanisme Scotch Yoke per a la rotació de
pas i vista en secció transversal del mecanisme.
La tasca 5 de la
memòria es va dur a terme amb èxit en el micro-aerogenerador per a l’assaig de
laboratori. El muntatge del mecanisme sobre el model real està pendent de
muntar-se. Cal recordar que el mecanisme ja està validat experimentalment en
assajos a escala treballant amb diferents condicions (tasca 2). A més, el
mecanisme proposat sí que està muntat sobre el sistema de rotor més pitch variable,
però manca instal·lar-lo al damunt de l’estructura tubular de suport. Amb
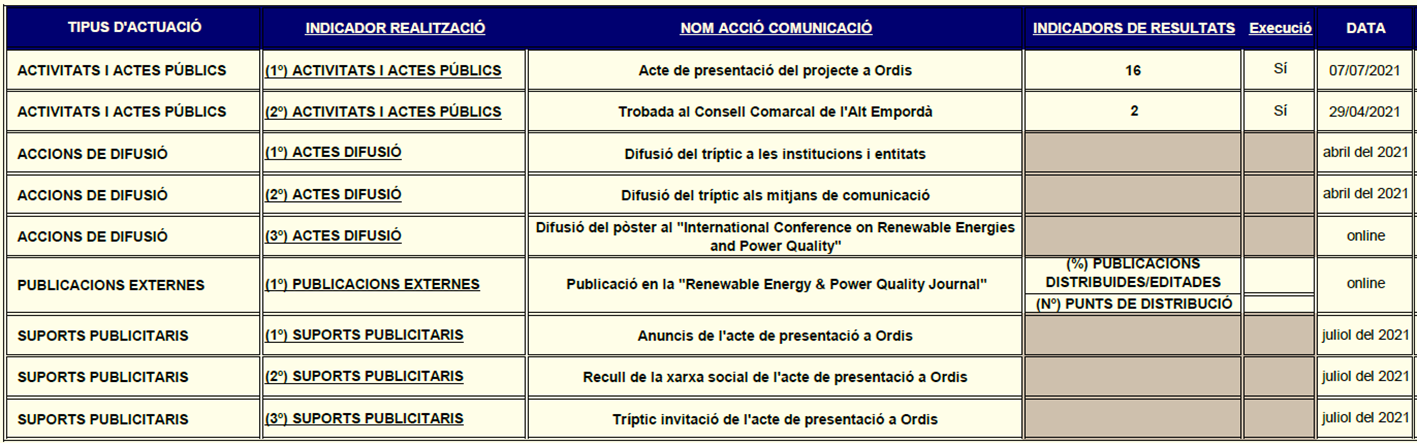
aquesta acció gairebé ja finalitzada, es va contactar amb possibles actors
interessats en aquesta tecnologia mitjançant un tríptic informatiu.
L’alcaldessa d’Ordis (municipi on està ubicat l’aerogenerador), el Consell
Comarcal de l’Alt Empordà i la D. O. Empordà hi van mostrar interès. De forma
especial el Consell Comarcal de l’Alt Empordà que ens va convocar a una reunió
per exposar amb més detall el projecte i promoure aquesta solució a la zona.
|
|

Figura 6. Assajos experimentals.
Per bé que
l’acabament de les tasques 6 (muntatge de sensors i del sistema electrònic) i 7
(testejar el control actiu de pitch) es necessita l’aerogenerador muntat en la seva
ubicació final, la comprovació dels diferents components electrònics i de la
proposta de disseny s’està fent a laboratori. Actualment, tres estudiants del
Grau en Enginyeria Electrònica Industrial i Automàtica que estan cursant el
Treball Final de Grau col·laboren amb aquestes tasques supervisades pel mentor
i, també en tot moment, pel científic emprenedor. L’estimació és que a
començaments de la tardor del 2021 ja es trobi el sistema operatiu en
l’enclavament definitiu. Aquest petit retard en el compliment de les tres
últimes tasques ha estat degut a la necessitat de comprovar experimentalment el
concepte a nivell TRL3 en el laboratori mitjançant un model a escala. Amb tot, l’objectiu principal del projecte
que consistia en la demostració de la viabilitat del control actiu de pitch
aplicat a un aerogenerador de baixa potència s’ha assolit amb èxit en relació
amb el micro-aerogenerador (0,4 kW) testejat a laboratori (a nivell TRL3). Per
a l’aerogenerador de 2,2 kW, les accions que s’estan duent a terme actualment
permeten pronosticar que s’assolirà el TRL3 a principis de la tardor del
2021.
DIFUSIÓ
PÚBLICA DELS RESULTATS DEL PROJECTE
|
|
|
|
|
|
|
|
|
|